Descripción del proyecto

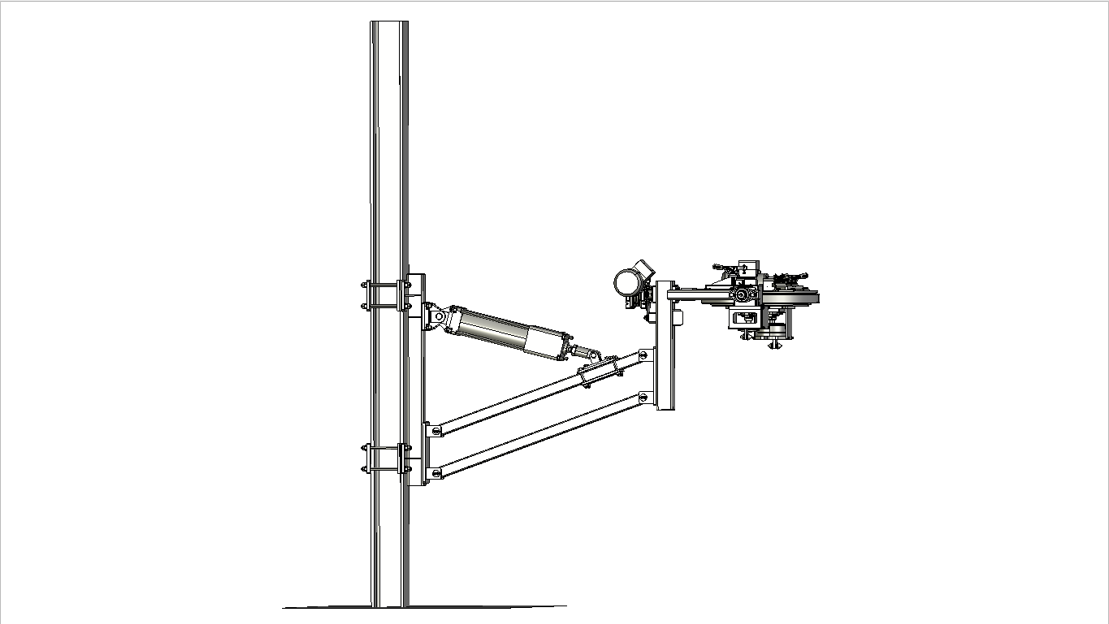


Manipulador Ingrávido
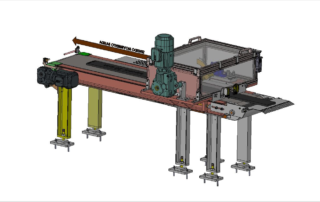
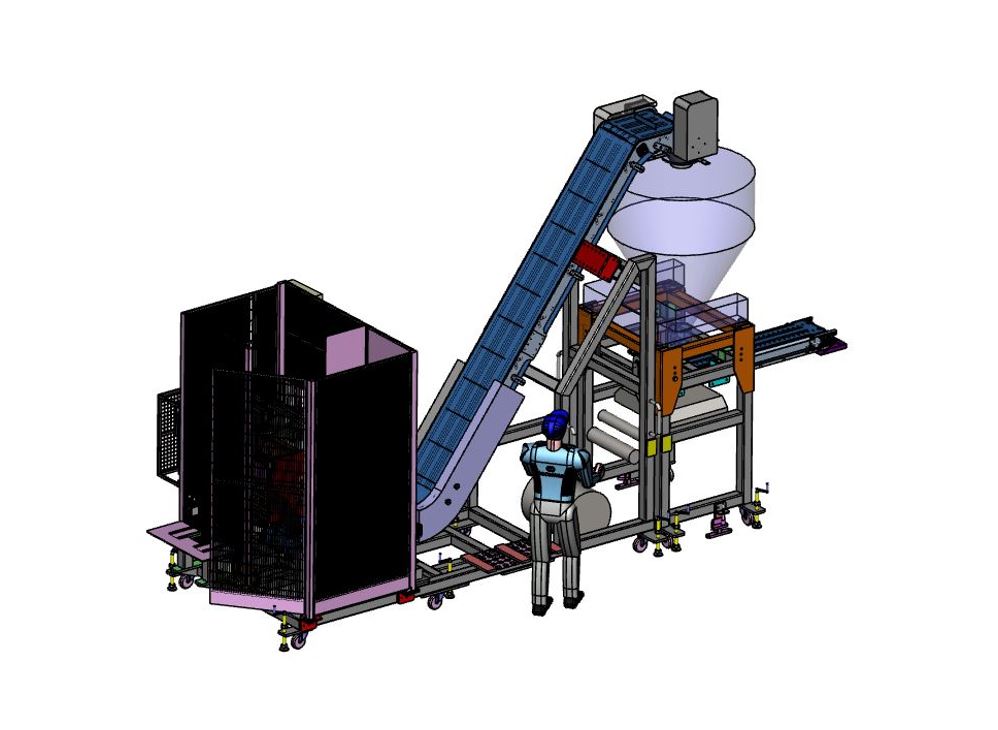
El sistema de elevación ingrávido por vacío está diseñado para objetos que exijan una manipulación ágil, rápida y precisa. Tanto el elevador como el útil de agarre se controlan con los mandos ergonómicos integrados y admite movimientos de volteo, giro, rotación etc. Especialmente útil en aquellos procesos que precisen la manipulación de placas, planchas o pantallas.
Detalles del proyecto
Llave en Mano
Puesta en marcha en tecemec
Puesta en marcha en cliente
Asistencia técnica y formación
Garantía






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}